
About Us
Welcome to Smart Autonomous Robotics Group led by Prof. Boyu Zhou. Boyu Zhou is currently an assistant professor at Sun Yat-sen University, School of Artificial Intelligence. He also works as an external supervisor for the HKUST-GZ Red Bird MPhil Program.
Our research focuses on mobile robot planning and perception that enable robust and agile autonomous operation in unknown complex environments. Detailed research information can be found in the following highlights, publications, and our videos.
Join us: We welcome applications for master's students and visiting students at the School of Artificial Intelligence, Sun Yat-sen University. Students interested in the HKUST-GZ Red Bird MPhil Program or PhD Program are also encouraged to reach out. You can contact us via email: uv.boyuzhou@gmail.com.
If the situation is suitable, we can arrange further discussions. Generally, you will receive a reply within a week. If you don't receive a response, feel free to send a follow-up email. If there is still no response, it may indicate that the fit is not ideal, and we apologize that we are unable to respond to every inquiry.
News
A paper is selected for the IEEE RA-L Best Paper Award
May 4th, 2024
Chenxing Jiang*, Hanwen Zhang*, Peize Liu, Zehuan Yu, Hui Cheng, Boyu Zhou, Shaojie Shen’s paper “H2-Mapping: Real-time Dense Mapping Using Hierarchical Hybrid Representation” has been selected for the 2024 IEEE Robotics and Automation Letters (RA-L) Best Paper Award!!
A paper is selected as the finalist for the IEEE ICRA Best Paper Award on Unmanned Aerial Vehicles
April 5th, 2024
Chen Feng, Haojia Li, Mingjie Zhang, Xinyi Chen, Shaojie Shen, and Boyu Zhou’s paper “FC-Planner: A Skeleton-guided Planning Framework for Fast Aerial Coverage of Complex 3D Scenes” has been selected as the finalist for the 2024 IEEE International Conference on Robotics and Automation (ICRA) Best Paper Award on Unmanned Aerial Vehicles!!
A paper is selected for the IEEE T-RO Best Paper Award
April 4th, 2024
Boyu Zhou, Hao Xu and Shaojie Shen’s paper “RACER: rapid collaborative exploration with a decentralized multi-UAV system” has been selected for the 2024 IEEE Transactions on Robotics (T-RO) King-Sun Fu Memorial Best Paper Award!!
A paper is accepted by RA-L
Febuary 29th, 2024
Yiming Luo, Zixuan Zhuang, Neng Pan, Chen Feng, Shaojie Shen, Fei Gao, Hui Cheng and Boyu Zhou’s work on “Star-searcher: a complete and efficient aerial system for autonomous target search in complex unknown environments” is accepted by the IEEE Robotics and Automation Letters (RA-L) for publication.
Three papers are accepted by ICRA 2024
January 29th, 2024
Three conference papers are accepted by the 2024 IEEE International Conference on Robotics and Automation (ICRA 2024), including:
- Xinyi Chen, Yichen Zhang, Shaojie Shen and Boyu Zhou. APACE: Agile and Perception-aware Trajectory Generation for Quadrotor Flights.
- Chengkai Wu, Ruilin Wang, Mianzhi Song, Fei Gao, Jie Mei, Boyu Zhou. Real-time Whole-body Motion Planning for Mobile Manipulators Using Environment-adaptive Search and Spatial-temporal Optimization.
- Chen Feng, Haojia Li, Jinqi, Jiang, Xinyi Chen, Shaojie Shen, and Boyu Zhou. FC-Planner: A Skeleton-guided Planning Framework for Fast Aerial Coverage of Complex 3D Scenes.
Three papers are accepted by RA-L and will be presented at ICRA 2024
August 22nd, 2023
Chenxing Jiang, Hanwen Zhang, Peize LIU, Zehuan Yu, Hui Cheng, Boyu Zhou and Shaojie Shen’s work on “H2-mapping: real-time dense mapping using hierarchical hybrid representation” is accepted by the IEEE Robotics and Automation Letters (RA-L) for publication.
August 9th, 2023
Haojia Li, Haokun Wang, Chen Feng, Fei Gao, Boyu Zhou and Shaojie Shen’s work on “Autotrans: a complete planning and control framework for autonomous UAV payload transportation” is accepted by the IEEE Robotics and Automation Letters (RA-L) for publication.
August 7th, 2023
Chen Feng, Hangning Zhou, Huadong Lin, Zhigang Zhang, Ziyao Xu, Chi Zhang, Boyu Zhou and Shaojie Shen’s work on “Macformer: map-agent coupled transformer for real-time and robust trajectory prediction” is accepted by the IEEE Robotics and Automation Letters (RA-L) for publication.
Highlights
Star-Searcher: A Complete and Efficient Aerial System for Autonomous Target Search in Complex Unknown Environments
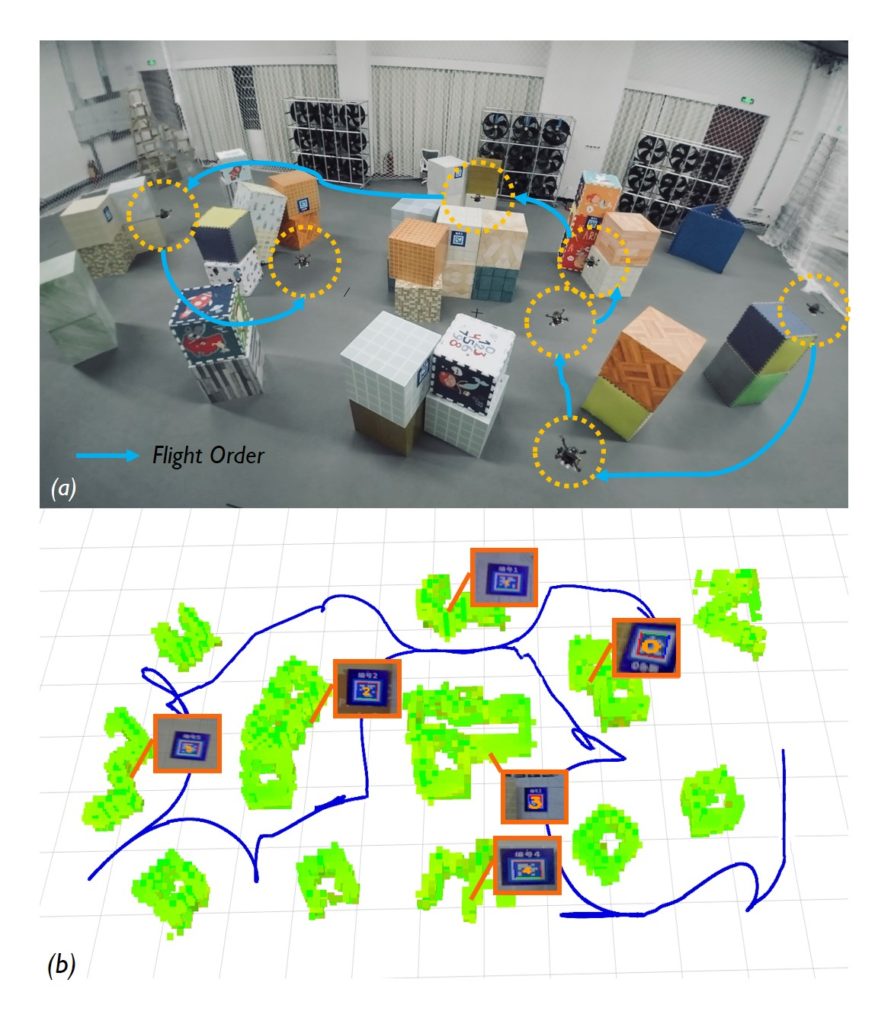
This paper tackles the challenge of autonomous target search using unmanned aerial vehicles (UAVs) in complex unknown environments. To fill the gap in systematic approaches for this task, we introduce Star-Searcher, an aerial system featuring specialized sensor suites, mapping, and planning modules to optimize searching. Path planning challenges due to increased inspection requirements are addressed through a hierarchical planner with a visibility-based viewpoint clustering method. This simplifies planning by breaking it into global and local sub-problems, ensuring efficient global and local path coverage in real time. Furthermore, our global path planning employs a history-aware mechanism to reduce motion inconsistency from frequent map changes, significantly enhancing search efficiency. [Video:Bilibili]
APACE: Agile and Perception-aware Trajectory Generation for Quadrotor Flights
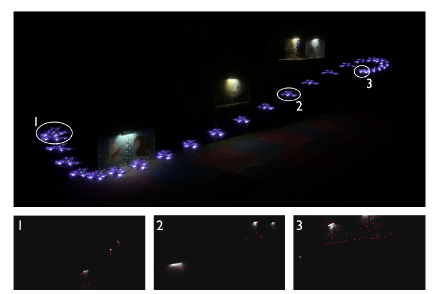
We present APACE, an Agile and Perception-Aware trajeCtory gEneration framework for quadrotors aggressive flight, that takes into account feature matchability during trajectory planning. We seek to generatea perception-aware trajectory that reduces the error of visual-based estimator while satisfying the constraints on smoothness, safety, agility and the quadrotor dynamics. The perception objective is achieved by maximizing the number of covisible features while ensuring small enough parallax angles. Additionally, we propose a differentiable and accurate visibility model that allows decomposition of the trajectory planning problem for efficient optimization resolution (ICRA 2024 Submission). [Video:Bilibili]
Real-time Whole-body Motion Planning for Mobile Manipulators Using Environment-adaptive Search and Spatial-temporal Optimization
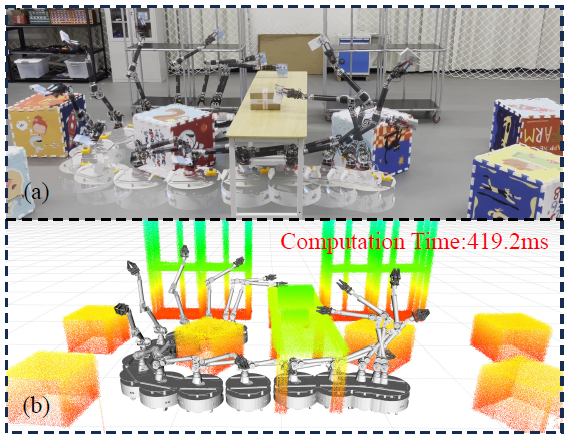
Mobile manipulators have recently gained significant attention in the robotics community due to their superior potential in industrial and service applications. However, the high degree of freedom associated with mobile manipulatorsposes challenges in achieving realtime whole body motion planning. To bridge the gap, we present a motion planning method capable of generating high-quality, safe, agileand feasible trajectories for mobile manipulators in real time (ICRA 2024 Submission). [Video:Bilibili]
FC-Planner: A Skeleton-guided Planning Framework for Fast Aerial Coverage of Complex 3D Scenes
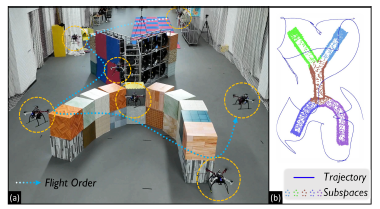
We propose FC-Planner, a skeleton-guided planning framework that can achieve fast aerial coverage of complex 3D scenes without pre-processing. We decompose the scene into several simple subspaces by a skeleton-based space decomposition. Additionally, the skeleton guides us to effortlessly determine free space. We utilize the skeleton to generate a minimal set of specialized and informative viewpoints for complete coverage. Based on SSD, a hierarchical planner effectively divides the large planning problem into independent sub-problems, enabling parallel planning for each subspace. The carefully designed global and local planning strategies are then incorporated to guarantee both high quality and efficiency in path generation. (ICRA 2024 Submission). [Video:Bilibili]
MASSTAR: A Multi-Modal Large-Scale Scene Dataset with a Versatile Toolchain for Surface Prediction and Completion
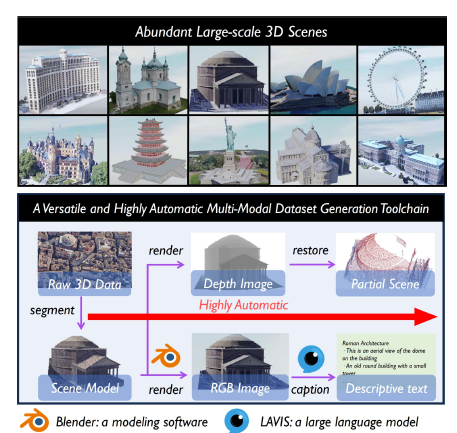
We propose MASSTAR: a multi-modal large-scale scene dataset with a versatile toolchain for surface prediction and completion. We collect a large amount of scene-level models including part of real-world captured data from a wide range of open-source works. A toolchain is also developed to facilitate processing the data by segmenting the raw 3D data and selecting the valuable model from raw 3D data and generating multi-modal data including RGB image, descriptive text, depth image, and partial point cloud. Additionally, we benchmark different algorithms trained on our dataset (ICRA 2024 Submission). [Video:Bilibili]
H2-Mapping: Real-time Dense Mapping Using Hierarchical Hybrid Representation

Recently, we propose a NeRF-based mapping method that enables higher-quality reconstruction and real-time capability even on edge computers of handheld devices and quadrotors by Chenxing JIANG and Hanwen ZHANG. Specifically, we propose a novel hierarchical hybrid representation and a coverage-maximizing keyframe selection strategy. Extensive experiments show our method achieves superior mapping results with less runtime compared to existing NeRF-based mapping methods. To the best of our knowledge, our method is the first to run a NeRF-based mapping method onboard in real-time.[Paper][Video:Bilibili][Video:Youtube][Code]
AutoTrans: A Complete Planning and Control Framework for Autonomous UAV Payload Transportation

Recently, we developed a real-time planning method for UAV payload system considering the time-varying shape and non-linear dynamics to ensure whole-body safety and dynamic feasibility by Haojia Li. Additionally, an adaptive NMPC with a hierarchical disturbance compensation strategy is designed to overcome unknown external perturbations and inaccurate model parameters. Extensive experiments show that our method is capable of generating high-quality trajectories online, even in highly constrained environments, and tracking aggressive flight trajectories accurately, even under significant uncertainty. [Video]
RACER: Rapid Collaborative Exploration Using a Decentralized Multi-UAV System
Recently, we develop a fully decentralized approach for exploration tasks using a fleet of quadrotors. The quadrotor team operates with asynchronous and limited communication, and does not require any central control. The coverage paths and workload allocations of the team are optimized and balanced in order to fully realize the system’s potential. The associated paper has been published at IEEE T-RO. [Paper][Video][Code]
PredRecon: A Prediction-boosted Planning Framework for Fast and High-quality Autonomous Aerial Reconstruction
Our recent work toward fully automated and highly efficient aerial reconstruction. We propose PredRecon, a prediction-boosted planning framework that can efficiently reconstruct high-quality 3D models for the target areas in unknown environments with a single flight, published at ICRA 2023, by Chen Feng. [Paper][Code][Video]